-
-
 Computex 2026 Live: Day three in Taipei
Computex 2026 Live: Day three in Taipei -
 Microsoft announces next-gen Majorana 2 quantum computing chip
Microsoft announces next-gen Majorana 2 quantum computing chip -
 Mainland Chinese exhibitors reportedly locked out of Computex 2026, as Taiwan entry permits stall
Mainland Chinese exhibitors reportedly locked out of Computex 2026, as Taiwan entry permits stall -
 PremiumIntel Xeon 6+ Computex roundtable interview transcript
PremiumIntel Xeon 6+ Computex roundtable interview transcript -
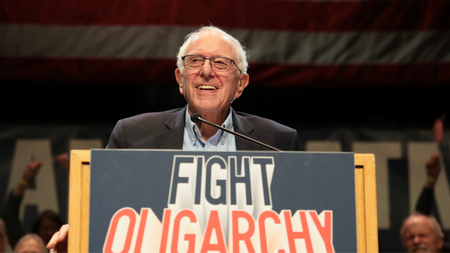 Bernie Sanders pushes for 50% public ownership of American AI companies
Bernie Sanders pushes for 50% public ownership of American AI companies -
 Jensen Huang says Nvidia wants to 'reinvent the single most important tool of humanity' with RTX Spark
Jensen Huang says Nvidia wants to 'reinvent the single most important tool of humanity' with RTX Spark -
 PremiumTom's Hardware Unfiltered: Computex 2026, Day 1
PremiumTom's Hardware Unfiltered: Computex 2026, Day 1
-







-
-
Jensen Huang says Nvidia wants to 'reinvent the single most important tool of humanity' with RTX Spark
-
 Kevin O'Leary claims Chinese propaganda is to blame for anti-datacenter sentiment, 'hundreds of millions of dollars' being spent to kill US dominance in AI
Kevin O'Leary claims Chinese propaganda is to blame for anti-datacenter sentiment, 'hundreds of millions of dollars' being spent to kill US dominance in AI -
 Mystery company accidentally blew $500 million on Claude AI in a single month
Mystery company accidentally blew $500 million on Claude AI in a single month -
 Microsoft warns GPU mining malware spread to users through SEO poisoning and AI chatbots
Microsoft warns GPU mining malware spread to users through SEO poisoning and AI chatbots -
 Leaks reveal US authorities concerned about the rise of ‘anti-tech extremists’ as AI data center issues become increasingly contentious
Leaks reveal US authorities concerned about the rise of ‘anti-tech extremists’ as AI data center issues become increasingly contentious -
 PremiumAI costs begin to bite as agents may increase token demand by 24 times, says Goldman Sachs report
PremiumAI costs begin to bite as agents may increase token demand by 24 times, says Goldman Sachs report -
 Italian council sets 200% tax on data center development in agricultural zones
Italian council sets 200% tax on data center development in agricultural zones -
 Erin Brockovich starts tracking AI data centers, calls on affected communities to submit issues
Erin Brockovich starts tracking AI data centers, calls on affected communities to submit issues -
 SpaceX admits it can't find enough chips for orbital AI, requires 'significantly more than are currently available to us'
SpaceX admits it can't find enough chips for orbital AI, requires 'significantly more than are currently available to us'
-








-
-
Bernie Sanders pushes for 50% public ownership of American AI companies
-
 Amazon unveils 'Resilient Network Graphs' data center network that cuts hardware by 69% and boosts throughput by 33%
Amazon unveils 'Resilient Network Graphs' data center network that cuts hardware by 69% and boosts throughput by 33% -
 Meta data center allegedly muddies Georgia town's drinking water, investigation underway
Meta data center allegedly muddies Georgia town's drinking water, investigation underway -
 Samsung reportedly set to distribute up to $26.6 billion to staff in AI-driven semiconductor bonuses after last-minute union deal
Samsung reportedly set to distribute up to $26.6 billion to staff in AI-driven semiconductor bonuses after last-minute union deal -
 Angry tiny Texas town council member proposes total ban on cellular and GPS devices in protest over AI dispute
Angry tiny Texas town council member proposes total ban on cellular and GPS devices in protest over AI dispute -
 Samsung narrowly avoids 18-day chip strike after last-minute wage deal with 48,000-worker union
Samsung narrowly avoids 18-day chip strike after last-minute wage deal with 48,000-worker union -
 Samsung and SK Hynix employees are reportedly abandoning overseas training programs to qualify for performance bonuses
Samsung and SK Hynix employees are reportedly abandoning overseas training programs to qualify for performance bonuses -
 US FTC reportedly launches antitrust probe into Arm following its launch of its own AGI CPU
US FTC reportedly launches antitrust probe into Arm following its launch of its own AGI CPU -
 Texas county passes data center ban for rural areas for a year, move comes in wake of AI data centers moving to remote areas to skirt regulations
Texas county passes data center ban for rural areas for a year, move comes in wake of AI data centers moving to remote areas to skirt regulations
-








-
-
 New AI-compute cryptocurrency Pearl sparks a GPU mining rush but profitability is already sliding
New AI-compute cryptocurrency Pearl sparks a GPU mining rush but profitability is already sliding -
 Korean funeral services company loses $33 million in secret crypto bet against Ethereum
Korean funeral services company loses $33 million in secret crypto bet against Ethereum -
 Physical attacks against crypto holders, including kidnap and assault, up 75% in 2025
Physical attacks against crypto holders, including kidnap and assault, up 75% in 2025 -
 Bitcoin trader recovers $400,000 using Claude AI after losing wallet password 11 years ago
Bitcoin trader recovers $400,000 using Claude AI after losing wallet password 11 years ago -
 Tennessee bans crypto ATMs that have become 'payment portal of choice for scammers'
Tennessee bans crypto ATMs that have become 'payment portal of choice for scammers' -
 Crypto scam takes advantage of Strait of Hormuz crisis by taking fake payments, leading to two ships being fired upon
Crypto scam takes advantage of Strait of Hormuz crisis by taking fake payments, leading to two ships being fired upon -
 Inventor showcases 3D printer filament dryer that mines Bitcoins and dries filament with waste heat, capable of 6 TH/s
Inventor showcases 3D printer filament dryer that mines Bitcoins and dries filament with waste heat, capable of 6 TH/s -
 British cryptographer Adam Back is the secret creator of Bitcoin, claims new report
British cryptographer Adam Back is the secret creator of Bitcoin, claims new report -
 Crypto platform Drift suffers from hack suspected to total $270 million
Crypto platform Drift suffers from hack suspected to total $270 million
-









-
-
 Windows Server vulnerability can grant system privileges with just a malformed packet
Windows Server vulnerability can grant system privileges with just a malformed packet -
 Researchers say they can spy on your browsing by measuring SSD activity through a browser API
Researchers say they can spy on your browsing by measuring SSD activity through a browser API -
 Wide-ranging 7-zip vulnerability with 8.8 CVE rating allows for code execution
Wide-ranging 7-zip vulnerability with 8.8 CVE rating allows for code execution -
 Microsoft's GitHub bans security researcher who posted zero-day Windows exploits because company ruined their life
Microsoft's GitHub bans security researcher who posted zero-day Windows exploits because company ruined their life -
 Zero-Day Clock visualizes and quantifies the effects of AI on software security
Zero-Day Clock visualizes and quantifies the effects of AI on software security -
 Europol's Operation Saffron takes down privacy-focused First VPN service
Europol's Operation Saffron takes down privacy-focused First VPN service -
 Hacker group hits 3,800 internal GitHub repositories via poisoned developer plugin
Hacker group hits 3,800 internal GitHub repositories via poisoned developer plugin -
 First Apple M5 memory exploit discovered using Anthropic AI, gives root access on MacOS
First Apple M5 memory exploit discovered using Anthropic AI, gives root access on MacOS -
 Microsoft BitLocker-protected drives can now be opened with just some files on a USB stick
Microsoft BitLocker-protected drives can now be opened with just some files on a USB stick
-









-
-
 Seven hospitalized after toxic gas fire at SK hynix advanced memory plant
Seven hospitalized after toxic gas fire at SK hynix advanced memory plant -
 TikTok owner ByteDance is reportedly developing its own custom AI CPUs
TikTok owner ByteDance is reportedly developing its own custom AI CPUs -
 PremiumTrailing-edge foundry roadmaps for GlobalFoundries, UMC, and SMIC
PremiumTrailing-edge foundry roadmaps for GlobalFoundries, UMC, and SMIC -
 Chinese university builds 3D chip design tool tailored to Huawei's ‘LogicFolding’ architecture
Chinese university builds 3D chip design tool tailored to Huawei's ‘LogicFolding’ architecture -
 China adds homegrown AI chips to 'secure and reliable' procurement list for the first time
China adds homegrown AI chips to 'secure and reliable' procurement list for the first time -
 SK hynix unveils 'iHBM' thermal architecture that cools AI memory at the source
SK hynix unveils 'iHBM' thermal architecture that cools AI memory at the source -
 PremiumImec builds world's first High-NA EUV-fabricated quantum dot qubit device
PremiumImec builds world's first High-NA EUV-fabricated quantum dot qubit device -
 Huawei claims sanctions-busting breakthrough with 1.4nm-class chips by 2031, claims 55% higher transistor density
Huawei claims sanctions-busting breakthrough with 1.4nm-class chips by 2031, claims 55% higher transistor density -
Samsung's $400,000 payout for memory workers sparks revolt as other divisions get only $4,000, fueling intentional production slowdowns
-








-
-
Microsoft announces next-gen Majorana 2 quantum computing chip
-
 PremiumIBM spins off America's first quantum chip foundry with $2 billion in federal and private funding
PremiumIBM spins off America's first quantum chip foundry with $2 billion in federal and private funding -
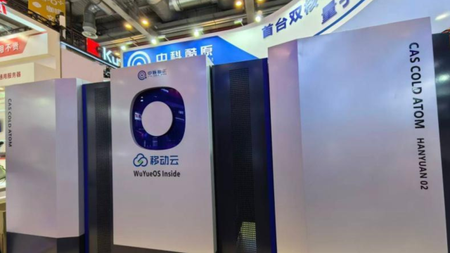 China's Hanyuan-2 debuts as 'world's first' dual-core quantum computer
China's Hanyuan-2 debuts as 'world's first' dual-core quantum computer -
 PremiumQuantum photonics roadmap — how Xanadu and PsiQuantum are looking to transfer qubits through beams of light
PremiumQuantum photonics roadmap — how Xanadu and PsiQuantum are looking to transfer qubits through beams of light -
 PremiumThe future of Quantum computing — the tech, companies, and roadmaps that map out a coherent quantum future
PremiumThe future of Quantum computing — the tech, companies, and roadmaps that map out a coherent quantum future -
 Quantum computing firm dangles $22,500 Bitcoin prize
Quantum computing firm dangles $22,500 Bitcoin prize -
 PremiumIBM and Cisco agree to lay the foundations for a quantum internet
PremiumIBM and Cisco agree to lay the foundations for a quantum internet -
 New Chinese optical quantum chip allegedly 1,000x faster than Nvidia GPUs for processing AI workloads
New Chinese optical quantum chip allegedly 1,000x faster than Nvidia GPUs for processing AI workloads -
 IBM's boffins run a nifty quantum error-correction algorithm on conventional AMD FPGAs
IBM's boffins run a nifty quantum error-correction algorithm on conventional AMD FPGAs
-








-
-
 First ever Cray T3D Supercomputer goes up for auction with $81,000 reserve
First ever Cray T3D Supercomputer goes up for auction with $81,000 reserve -
 Elon Musk restarts Dojo3 'space' supercomputer project as AI5 chip design gets in 'good shape'
Elon Musk restarts Dojo3 'space' supercomputer project as AI5 chip design gets in 'good shape' -
 AMD and Eviden unveil Europe's second exascale system
AMD and Eviden unveil Europe's second exascale system -
 Nvidia to build seven AI supercomputers for the U.S. gov't with over 100,000 Blackwell GPUs
Nvidia to build seven AI supercomputers for the U.S. gov't with over 100,000 Blackwell GPUs -
 Nvidia unveils Vera Rubin supercomputers for Los Alamos National Laboratory
Nvidia unveils Vera Rubin supercomputers for Los Alamos National Laboratory -
 U.S. Department of Energy and AMD cut a $1 billion deal for two AI supercomputers
U.S. Department of Energy and AMD cut a $1 billion deal for two AI supercomputers -
 China's supercomputer breakthrough uses 37 million processor cores to model complex quantum chemistry at molecular scale
China's supercomputer breakthrough uses 37 million processor cores to model complex quantum chemistry at molecular scale -
 Start-up hails world's first quantum computer made from standard silicon
Start-up hails world's first quantum computer made from standard silicon -
 Nvidia GPUs and Fujitsu Arm CPUs will power Japan's next $750M zetta-scale supercomputer
Nvidia GPUs and Fujitsu Arm CPUs will power Japan's next $750M zetta-scale supercomputer
-









-
-
 New 3D printing process could improve superconductors
New 3D printing process could improve superconductors -
 New research shows naturally occurring mineral is an 'unconventional superconductor' when purified
New research shows naturally occurring mineral is an 'unconventional superconductor' when purified -
 New research reignites the possibility of LK-99 room-temperature superconductivity
New research reignites the possibility of LK-99 room-temperature superconductivity -
 U.S. Govt and researchers seemingly discover new type of superconductivity in an exotic, crystal-like material
U.S. Govt and researchers seemingly discover new type of superconductivity in an exotic, crystal-like material -
 Nature Retracts Controversial Room Temperature Superconductor Paper (But Not LK-99)
Nature Retracts Controversial Room Temperature Superconductor Paper (But Not LK-99) -
What is a Superconductor?
-
 MIT's Superconducting Qubit Breakthrough Boosts Quantum Performance
MIT's Superconducting Qubit Breakthrough Boosts Quantum Performance -
 LK-99 Research Continues, Paper Says Superconductivity Could be Possible
LK-99 Research Continues, Paper Says Superconductivity Could be Possible -
 Is LK-99 a Superconductor After All? New Research and Updated Patent Say So
Is LK-99 a Superconductor After All? New Research and Updated Patent Say So
-









